







විශේෂාංග
Study ප්රමාණවත් ශක්තියක් හා දෘඩතාවයකින් යුත් වානේ-වෙල්ඩින් ව්යුහය;
• හයිඩ්රොලික් පහළ ආ roke ාත ව්යුහය, විශ්වාසදායක සහ සිනිඳුයි;
• යාන්ත්රික නැවතුම් ඒකකය, සමමුහුර්ත ව්යවර්ථය සහ ඉහළ නිරවද්යතාවය;
Opter බහුවන සුමට සැරයටියකින් ටී වර්ගයේ ඉස්කුරුප්පු කිරීමේ යාන්ත්රණය මුදා හරිනවා.
නැමීමේ අධි නිරවද්යතාවය සහතික කිරීම සඳහා ආතතිය වන්දි ගෙවීමේ යාන්ත්රණ සඳහා ඉහළ මෙවලම
සීඑන්සී පද්ධතිය
-Displaycreen
-ඉන්ටේටඩ් ප්ලස්ෆියුෂන්
USB MOUSPORTOPTORT, යතුරුපුවරු වරාය, රු .232, ආරක්ෂිත පීඑල්සී වරාය;
යන්ත්ර වැඩ කරන කාලය සහ නැමීමේ / කාවැද්දීම කාලය කිමොමීටික් සමුච්චය කිරීම;
-ඩිගිටල් ස්පර්ශ කිරීමේ වැඩසටහන්කරණය;
-ඩිගිටල් නැළු ක්රමලේඛනය;
-Utomatt දත්ත සමුදාය ක්රමාංකනය;
දෝෂ අනතුරු ඇඟවීමේ දැන්වීම; හයිඩ්රූ


ඉහළ මෙවලම් වේගවත් කලම්පයක්
Count Callumply Clamping උපාංගය වේගවත් කලම්පයක් වේ
මල්ටි-වී පහළ ඩයි ක්ලැම්ප් (විකල්පය)
විවිධ විවරයන් සමඟ මල්ටි වී පහළ මැරෙන්න


පසුමුල්
Ob ගුව ඉස්කුරුප්පු / ලයිනර් මාර්ගෝපදේශය ඉහළ නිරවද්යතාවයක් වේ
ඉදිරිපස සහාය
Aluminuinum මිශ්ර ලෝහ ද්රව්ය වේදිකාව, ආකර්ශනීය පෙනුම,
සහ වැඩපොළේ මුල සිටම අඩු කරන්න.


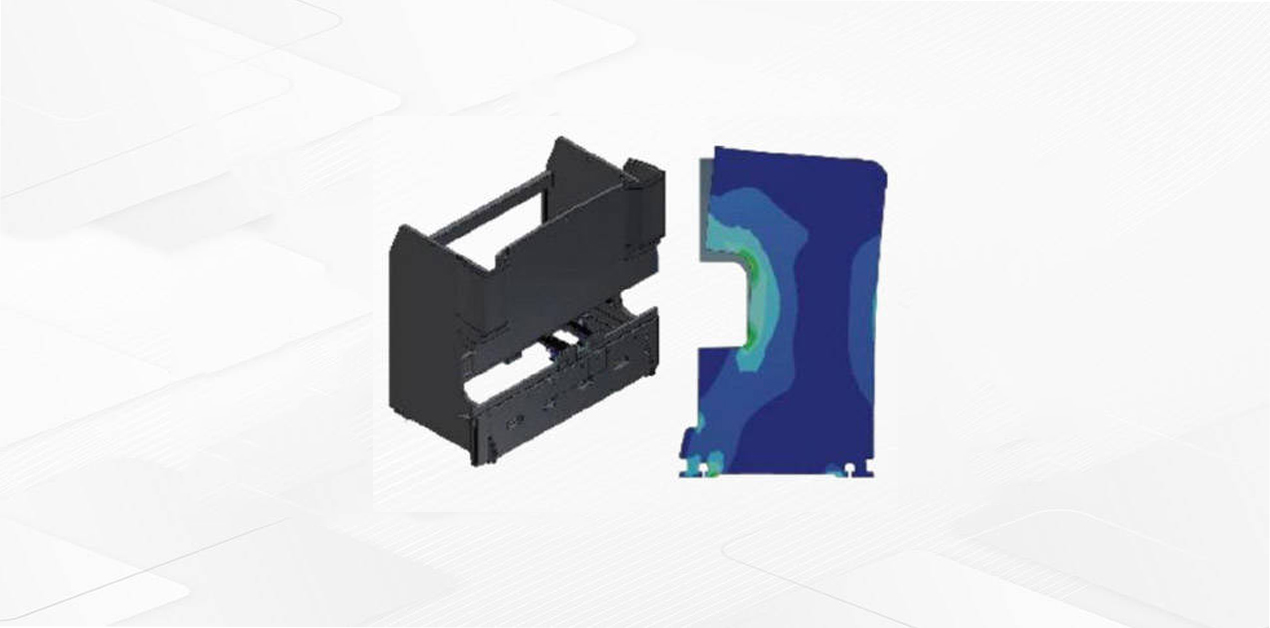
වැඩමුළු සඳහා විකල්ප ඔටුන්න වන්දි
En උත්තල කු ed ් ch යක් සහිත උත්තල ආනත කු ed ් as යකින් සමන්විත වන මතුපිටකින් සමන්විත වේ. සෑම නෙරා ඇති කු ed ් alom ය නිර්මාණය කර ඇත්තේ විනිවිදකයේ හා වැඩ කළ හැකි අපිරිසිදු වක්රය අනුව සීමිත මූලද්රව්ය විශ්ලේෂණයෙනි.
Re සීඑන්සී පාලක පද්ධතිය පැටවීමේ බලය මත පදනම්ව අවශ්ය වන්දි මුදල ගණනය කරයි. මෙම බලය විනිවිදකයේ සහ වගුවේ සිරස් තහඩු වල අපගමනය හා විරූපණය ඇති කරයි. ස්ලයිඩරය සහ වගුව මගින් ඇති වන අපිරිසිදුකම සඳහා effectively ලදායී ලෙස වන්දි ගෙවීමට සහ කදිම නැමීමේ වැඩ කොටස සඳහා effectively ලදායී ලෙස වන්දි ගෙවීමට හා පරමාදර්ශී නැවුම් වැඩ කොටස සඳහා effectively ලදායී ලෙස වන්දි ලබා දීම සඳහා ස්වයංක්රීයව කු ed ් of යේ සාපේක්ෂ චලනය ස්වයංක්රීයව පාලනය කරන්න.
ඉක්මන් වෙනස් කිරීමේ පහළම මැරෙන්න
පතුලේ මියයෑමේ 2-V ඉක්මන් වෙනස් කිරීම දන්න

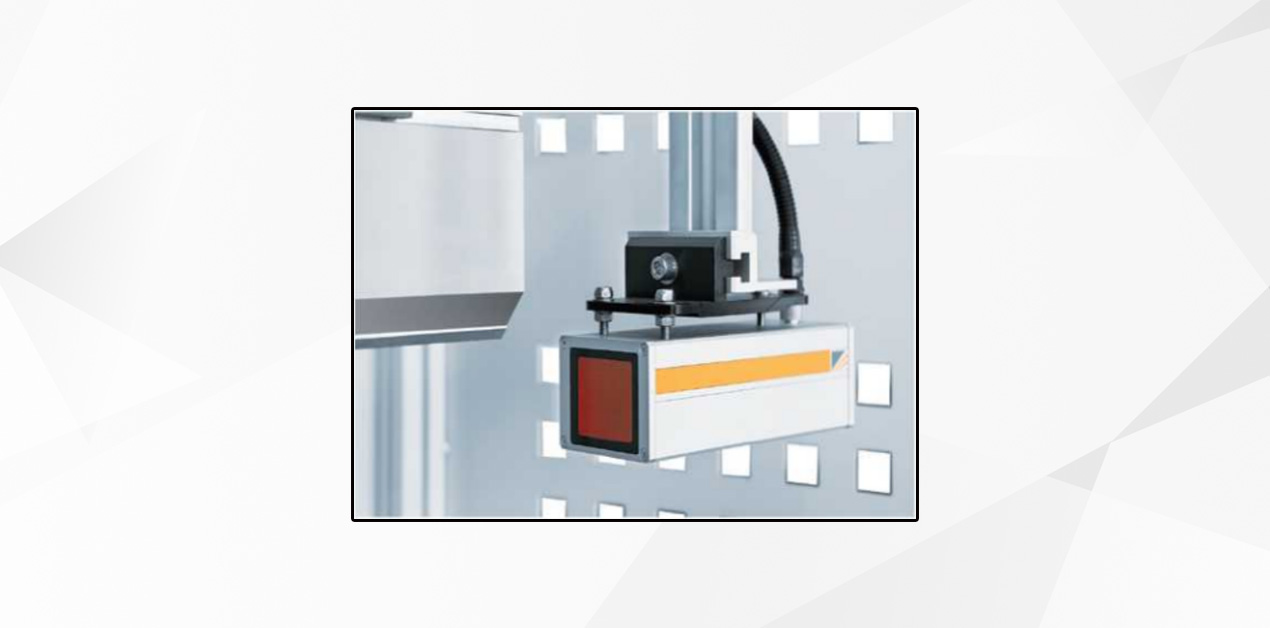
ලේසර්සේෆ් ආරක්ෂක ආරක්ෂකයා
CNCES-OHS SACES SABER SURE, CNC පාලක සහ ආරක්ෂක පාලන මොඩියුලය අතර සන්නිවේදනය
Cource ක්රියාකරුගේ ඇඟිලි වල වටයේ අගයට වඩා වැඩි මෙවලම් (ඉදිරිපස, මැද හා තාත්වික) ඔබේ ඇඟිලි තුඩුවල අගයට වඩා අඩු කොටුවකට වඩා පහළින් කදම්භය නම්, නම්යශීලීව වසා දැමිය හැකිය.
යාන්ත්රික සර්වෝ නැමීමේ උදව්
හැකිලීම සක්රිය කිරීම සඳහා ලකුණු කිරීම සක්රිය කිරීම සාක්ෂාත් කරගත හැක්කේ කවදාද? පහත දැක්වෙන කෝණය හා වේගය ගණනය කර සීඑන්සී පාලකය විසින් ගණනය කර පාලනය කරනු ලැබේ.
The අත මගින් උස, ඉදිරිපස සහ පසුපස, විවිධ පහළ ඩයි විවෘත කිරීම සඳහා සශ්රීකත්වය ඉහළට හා පසුපස අතින් සකස් කළ හැකිය
· සහාය වේදිකාවට බුරුසුව හෝ මල නොබැඳෙන වානේ නළයක් විය හැකිය, වැඩකරන ප්රමාණයට අනුව, සහායක ප්රමාණයේ සම්බන්ධතා චලනයන් දෙකක් හෝ වෙන්කිරීමේ චලනයන් වර්ග කරන්න.
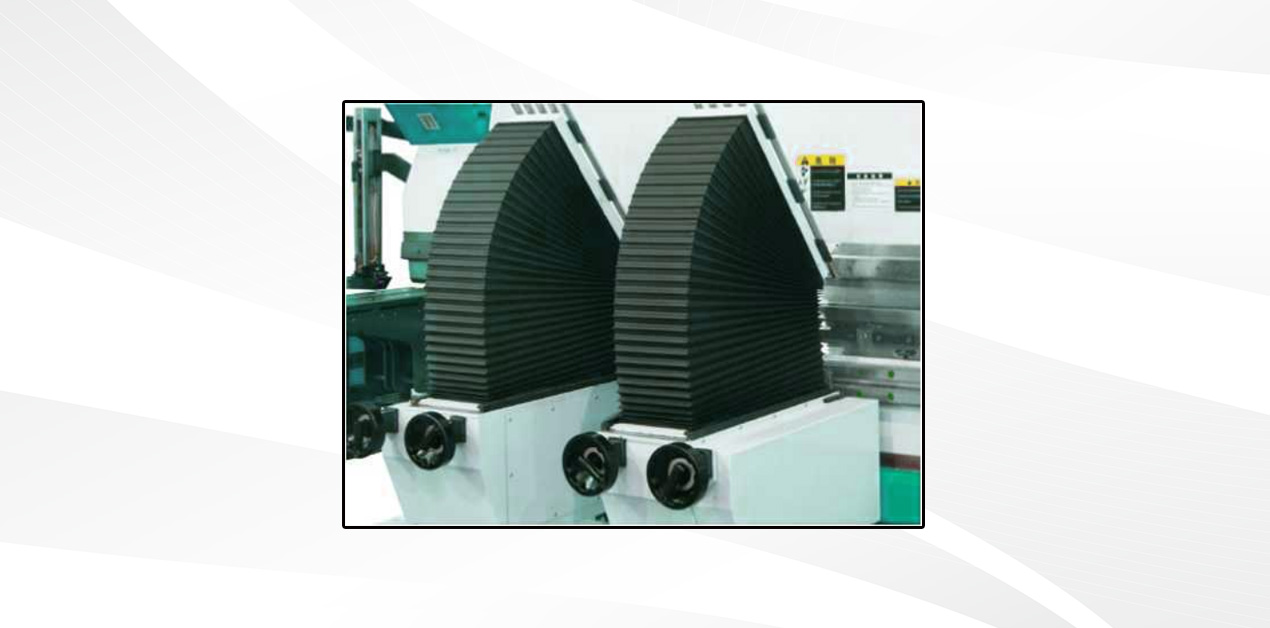
හයිඩ්රොලික් පද්ධතිය
උසස් ඒකාබද්ධ හයිඩ්රොලික් පද්ධතිය අනුගමනය කිරීම, නල මාර්ග ස්ථාපනය කිරීම සහ යන්ත්රයේ ක්රියාකාරිත්වය තුළ ඉහළ විශ්වසනීයත්වයක් සහ ආරක්ෂාවක් සහතික කරයි.
ස්ලයිඩර් චලනයෙහි වේගය සාක්ෂාත් කරගත හැකිය. වේගවත්, මන්දගාමී නැමීම, වේගයෙන් ආපසු ගෙවීම, වේගයෙන් ආපසු ගෙවීම, මන්දගාමී වීම නිසි පරිදි සකස් කළ හැකිය.
විදුලි පාලක පද්ධතිය
රූපලාවණ්ය සංරචක සහ ද්රව්ය ජාත්යන්තර ප්රමිතීන්, ආරක්ෂිත, විශ්වාසදායක සහ දිගු ආයු කාලයක් සපුරාලයි.
යන්ත්රය 50hz, 380V තුන් අදියර සිව්-වයර් බලශක්ති සැපයුම අනුගමනය කරයි. පාලන ට්රාන්ස්ෆෝමර් විසින් දෙවන අදියර අනුගමනය කරයි. 6V සැපයුම් දර්ශකය, 24V වෙනත් පාලක සංරචක සැපයීම.
යන්ත්රයේ විද්යුත් පෙට්ටිය යන්ත්රයේ දකුණු පැත්තේ පිහිටා ඇති අතර එය යන්ත්රයේ ක්රියාත්මක වන සෑම අංගයකම එය නැවත ලබා ගත හැකි නම්, එය අළුත්වැඩියා කිරීම සඳහා එය මයික්රෝ ස්විච් ලීවරය අදින්න.
ඉදිරිපස සහ පසුපස මිනුම්
ඉදිරිපස වරහන: එය වැඩ කරන අයගේ පැත්තේ තබා ඉස්කුරුප්පු වලින් ආරක්ෂා කර ඇත. පුළුල් හා දිගු තහඩු නැමීමේදී එය ආධාරකයක් ලෙස භාවිතා කළ හැකිය.
පසුපස මිනුම: එය බෝල ඉස්කුරුප්පු සහ රේඛීය මාර්ගෝපදේශය සමඟ ආපසු මිනුම් යාන්ත්රණයක් අනුගමනය කරයි. අධි නිරවද්ය ස්ථානගත කිරීම නැවතුම් නැවතුම ද්විත්ව රේඛීය මාර්ගෝපදේශක කදම්බයේ ඇඟිල්ල පහසුවෙන් සහ දකුණට ගමන් කළ හැකි අතර, වැඩ කොටස "ඔබ කැමති ආකාරයට" නැමුණුවාය.






