







Caratteristiche
• Struttura di salvezza cumpletu, cun forza suficiente è rigidità;
• Struttura di u colpu idraulica, affidabile è liscia;
• unità motora meccanica, torque sincrònica, è alta precisione;
• U backgauge adopta u meccanisimu di backgauge di u passu t-type con radia liscia, chì hè guidata da un mutore;
• strumentu superiore cù mecanismu cumpensamentu di tensione, per guarantiscia a precisione alta di piegatura
Sistema CNC
-Displaycreen
-Inchjarti di prugnu
-Intéport boouseport, portu di tastiera, RSS2, portu di portu in salu;
Accumulazione -aAtomatica di u tempu di travagliu è u tempu di piegatura / curvatura;
-Digitale di u toccu di toccu;
-Digitale prugrammazione di moldu;
A calibrazione di a basa di dati -Automaticu;
-Error avvisu di avvisu; idrau


Clamp veloce in cima
· U strumentu di clamping superiore hè u clamp veloce
MULTI-V BOTTOGLING DI BOTGING (opzione)
Mori di fondu multi-v cù diverse aperture


Capitale
· Raper / guida di u liner sò alti precisione
Supportu Front
· PLAY MAY DI ALUMINAM TENU, APPLICAZIONE ATTRAMERATA,
È diminuite u screnu di u workpicec.


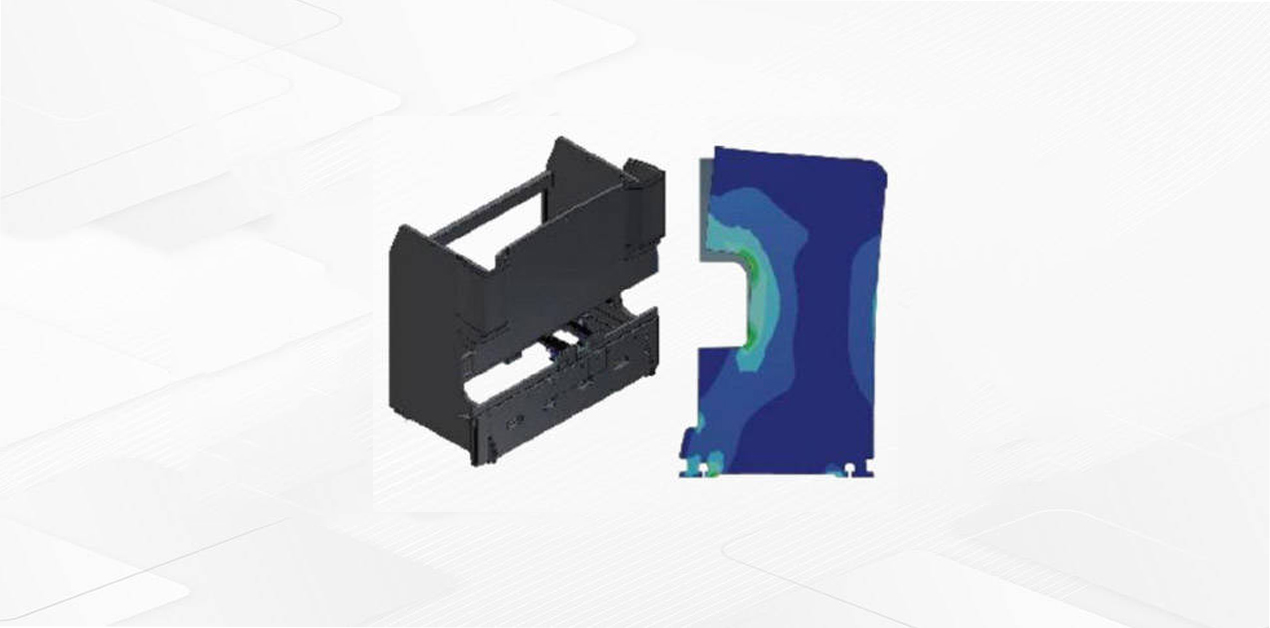
Compensazione di a corona facultativa per worktable
· Un cundice convex hè cumpostu di un inseme di cunvince cunvince cun una superficia bevelata. Ogni cunchiglia protruding hè cuncipita da l'analisi di l'elementu finita secondu a curva di a slide di a Slide è Worktable.
· U sistema di cuntroller CNC calcula a quantità di compensazione necessaria basata nantu à a forza di carica. Sta forza causa di deviione è di deformazione di i piatti verticali di a diapositiva è u tavulinu. E cuntrullà automaticamente u muvimentu relative di a risa convex, dunque per a deformazione di a furia causata da u slider è di a tavula riserva.
Cambiamenti rapidu bothmm tue
· Adopt 2-v Rapidu di cambiamentu rapidu per u fondu di mori

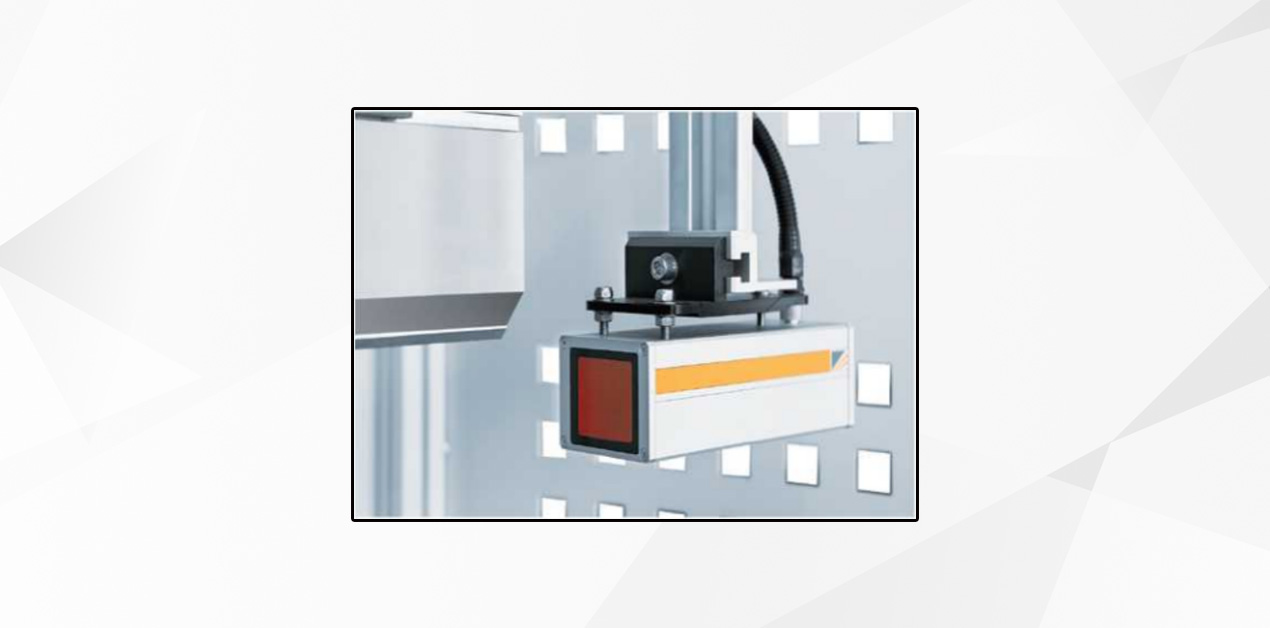
Guardia di sicurezza Lasersafe
· Guardia di sicurezza di Lasersafe
· DUALE DI PROTEZIONE SUL DATE DAL 4MM STRE A TIP DI PROCESSATI OPERATORE DI OPERATORE (FROND E REALE (FROSS) ATTENU A PRODUCAZIONE PROPRIMENTA EFFICE.
Aiutu u servitore meccanicu
·· Dumandà u platu di Supportu di Marcu pò realizà a funzione di vultassi dopu à l'angolo è di a velocità CNC hà lasciatu è dirittu.
· Ajuste l'altezza è falata a manu, fronte è posteriore pò ancu esse aghjustà manualmente per adattà per l'apertura di u fondu sfarente
· Platform di Supportu pò esse un tubu d'acciaio inox, secondu a dimensione di u travagliu, dui sustegnu u muvimentu di ligame o di u muvimentu separatu pò esse chosed.
Sistema d'idraulico
Aghjunghje u sistema d'idragratu avanzatu Reduce a stallazione di pipelines è assicure un altu gradu di affidabilità è securità in l'operazione di a macchina.
A velocità di u muvimentu di slider pò esse realizatu. L'azzione rapida, rottura lenta, ritornu di ritornu di ritornu, è veloci, rallentà a velocità pò esse aghjustata in modu apprupriatu.
Sistema di cuntrollu elettricu
U cumponente eletricu è materiali creghjunghjenu i norchi internaziunali, sicura, affidabile è longa vita.
A macchina adopps 50hz, 380v alberghio aretante di arotante di quattru fasi tre-fase heor-wiecta tre-fase 380v è a linea lampadia adopts 6V Fornitore Indicatore, 24V Fornitura altre cumpunenti di cuntrollu.
La scona elettricicu di a macchina si trova à u latu drittu di a macchina è hè dogeditu cù un strumentu di apertura è a pagina d'ottobre, è a funzione di u puntu di opinamentu, è a funzione di u puntu di l'optage, pò esse ricurdatu Vi Lè Tirà The leva micro switch.
Fronte è back gauge
Bracket di Front: Hè pusatu nantu à u latu di u workttable è assicuratu da viti. Pò esse usatu cum'è un sustegnu quandu u bending wide è longhe fogli.
Back Gauge: Adopce u mecanismu di cauge cù u viti di ballò è a guida lineale hè guidata da u mutore di u servitore è una cintura di timing sincronica. U dito d'alta precisione di Posizione pò esse spustata facilmente è ghjustu nantu à u doppiu lineale di a guida di a guida di a guida
-

Lha05 macchina piegata flexible à u prezzu di u prezzu per ...
-

Top Seller Seller Hydraulic Fark Footru Pegetali Pegetendu ...
-

Bona foglia di fustu elettrici di metallu ...
-

WG Serie Menal Bending Machine in vendita
-

Fabbrica calma enterazione di nova funzione multi-fun bend ...
-

Tursion Axis Servo CNC Mattoly Curs Machine






